Controlling an HA Service
When a new service is added to an RSF-1 High Availability cluster, its state will initially be set to stopped and automatic, after which the cluster will start the service on the services' preferred node.
Once the service is started, its state is controlled using the supplied webapp or command line utilities.
The steps that follow make the following assumptions:
- A cluster has already been created on a set of nodes. For more information about creating a cluster, see Getting started with a ZFS cluster
- A HA service has already been created in the cluster. For more information about creating a ZFS HA service, see Getting Started
For more information about HA service status, see Understanding Service Status.
Controlling a Service
All High Availability services configured in a cluster can be controlled from the Dashboard tab.
Upon navigating to Dashboard a summary of the cluster, including a service's state will be shown:
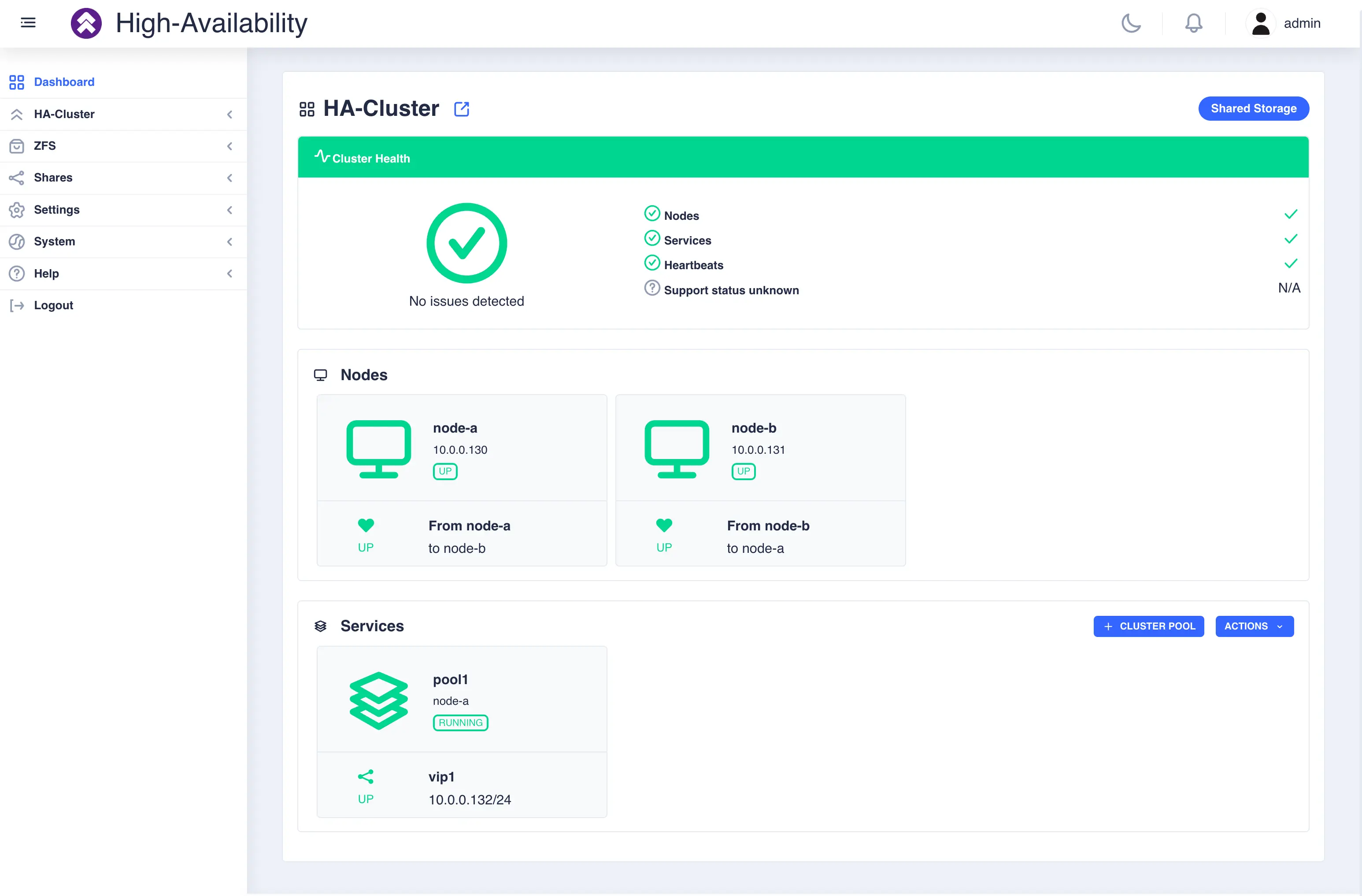
In this example, there is a single service pool1 which is running on the node mgub01, automatic1 and unblocked on both nodes.
Setting a Service Mode
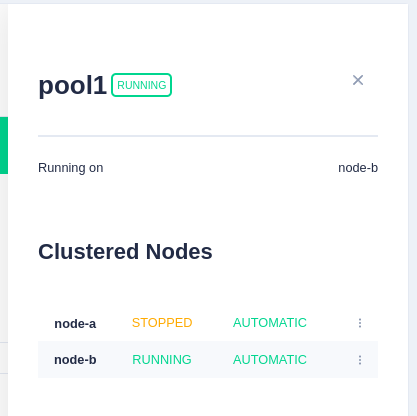
A service's mode can be set to either automatic or manual. Select the service to display additional detail in the sidebar. Next select the ⋮ button for the service instance that is to be controlled. The display will change to show available actions:
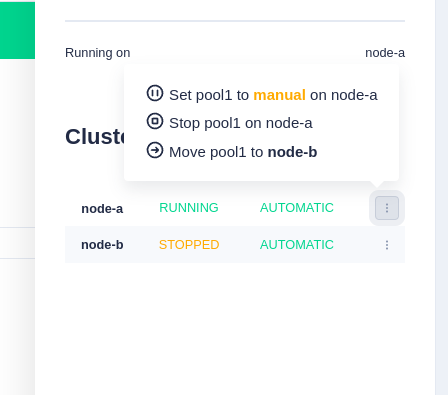
One of the options shown is to set the service mode. If the service is in automatic mode (as in the example), then the option will set the service to manual. If it is already manual, then the option will be to set it to automatic mode.
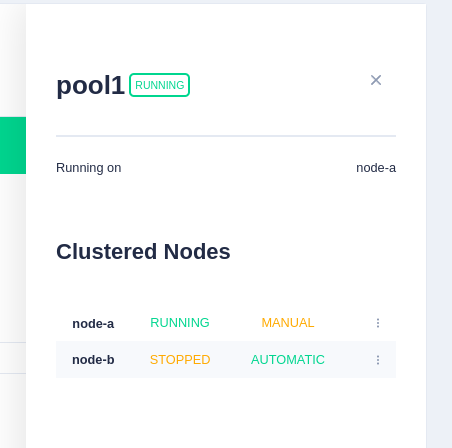
Select the desired option to change the service's mode, confirm the action and the service status will change:
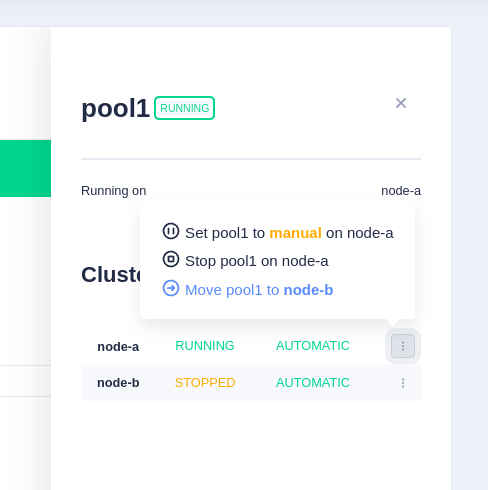
Moving a Service
A running service is moved from the Dashboard tab. It is not necessary to change the service mode (automatic/manual) on either the source or destination node - any required changes to these settings are handled automatically by RSF-1.
The service can only move if it is running on the source node and stopped on the destination. Any other states will block the move operation.
Select the action to move the service from the running node to a remote node:
When the service move is confirmed, the state changes will be displayed on the Dashboard:
Starting a Service
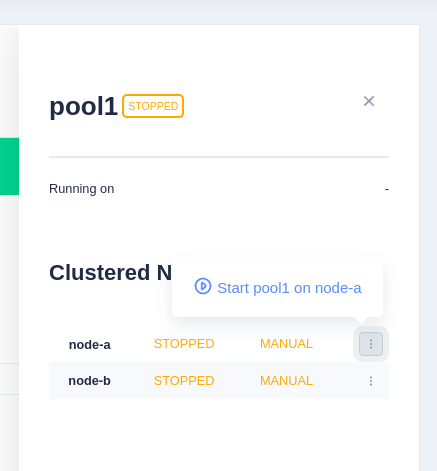
It is only possible to start a service when it is stopped on all nodes in the cluster. This will be shown in the list of actions. Select the option to start the service on one of the cluster nodes and the service state changes will be shown in the Dashboard view:
Stopping a Service
To stop a service, select the appropriate option from the list of actions for the node that is currently running the service.
When a service is stopped on a node, the service move is set to manual on that node to avoid the service starting again.
Note
If you do not want a service to start on another node after the stop action completes, set it to manual mode on all nodes before issuing the stop command.
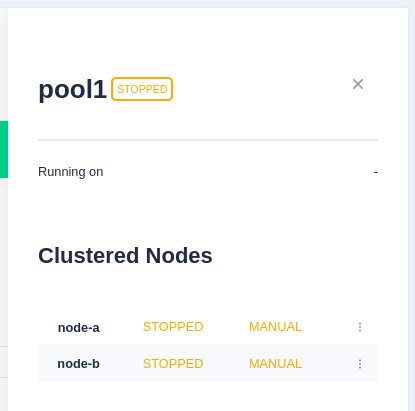
When the stop completes, the service will be shown as manual and stopped on all nodes:
-
Automatic failover mode means a service will failover automatically should the server it is running on fail. When in manual failover mode a service will not automatically fail over. ↩